
Page 14 - 东莞市厚街中学2025届高三毕业纪念
P. 14
PAGE/13 成都工业学院科研成果汇编
1. 高速轻载少自由度机器人设计理论与控制技术研究
项目简介
针对电子信息制造业和轻工生产对机器人的特殊需要,对高速、高加速度和高精度少自由度机器人系统 ( 包括并联 /
混联机器人和 SCARA 机器人 ) 深入开展设计理论研究、控制技术开发和核心装备研制。
主要内容包括:1) 大偏转角高速混联机构的构型设计,2) 高速混联机构的解耦驱动设计,3) 少自由度机器人动态性
能优化设计,4) 少自由度机器人高性能控制系统的开发,5) 电子制造机器人生产线的构建暨综合应用研究。
通过综合上述基础理论研究和关键技术开发,形成一套完整的关于高性能少自由度机器人的设计基本理论和控制技术
体系,解决 3C 和轻工制造行业自动化装备中的重大共性问题。
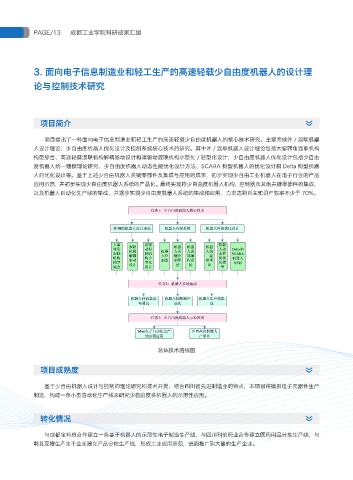
关节模块总体传动方案 多机器人无碰协调运动的两阶段规划法流程图
多机器人协作交互网模型
项目成熟度
已在双 SCARA 异型插件工作站、多种工业机器人、水刀切割机等工业场景测试通过,性能基本可以满足生产的需要。
转化情况
无