
Page 31 - 东莞市厚街中学2025届高三毕业纪念
P. 31
智能装备与控制技术研究 PAGE/30
9. APS 自动上料设备技术开发项目简介
项目简介
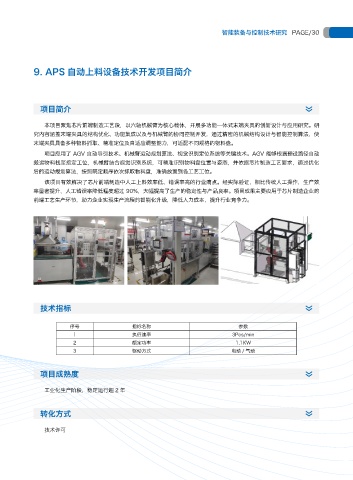
本项目聚焦芯片前端制造工艺段,以六轴机械臂为核心载体,开展多功能一体式末端夹具的创新设计与应用研究。研
究内容涵盖末端夹具的结构优化、功能集成以及与机械臂的协同控制开发,通过精密的机械结构设计与智能控制算法,使
末端夹具具备多种物料抓取、精准定位及自适应调整能力,可适配不同规格的物料盘。
项目应用了 AGV 自动导引技术、机械臂运动规划算法、视觉识别定位系统等关键技术。AGV 能够根据预设路径自动
搬运物料栈至指定工位,机械臂结合视觉识别系统,可精准识别物料盘位置与姿态,并依据芯片制造工艺要求,通过优化
后的运动规划算法,按照既定顺序依次抓取物料盘,准确放置到各工艺工位。
该项目有效解决了芯片前端制造中人工上料效率低、错误率高的行业痛点。经实际验证,相比传统人工操作,生产效
率显著提升,人工错误率降低幅度超过 90%,大幅提高了生产的稳定性与产品良率。项目成果主要应用于芯片制造企业的
前端工艺生产环节,助力企业实现生产流程的智能化升级,降低人力成本,提升行业竞争力。
技术指标
序号 指标名称 参数
1 执行速率 3Pcs/min
2 额定功率 1.1KW
3 驱动方式 电动 / 气动
项目成熟度
工业化生产阶段,稳定运行超 2 年
转化方式
技术许可